One Dimensional Systems
Now that we have shown that any higher order ODEs can be reduced into a system of first order ODEs, the ability to analyze first order ODEs is obviously important. The first step in this process is fixed point analysis.
Fixed Point Analysis
As mentioned, we can analyze systems of autonomous first order ODEs individually at first. We begin with the aforementioned fixed point analysis. First let's consider such a system,
\[ \dot{x} = f(x) \]The fixed points, are the points \(x^*\) such that
\[ f(x^*) = 0 \]Since the right hand side of these systems are algebraic, it is often pretty straightforward to find these points. It's not always easy to find it analytically, but numerical approximations can work as well.
Now what does it mean for our system when \(f(x) = 0\)? This means that our state variable \(x\) is not changing. That is, the derivative (instantaneous rate of change) is \(0\) and will stay \(0\). Since,
\[ \dot{x} = f(x^*) = 0 \]Finding this point is simply finding the value of \(x\) at which the state will never move. This is why it's called a fixed point. Due to our uniqueness and existence theorems, we know that no other trajectory can ever intersect the fixed point. This is due to the fact that there is a trajectory starting at the fixed point and stays there forever, and if some other trajectory intersected this point it would contradict the uniqueness of solutions that we have. However, fixed points dominate the behavior of any system but especially 1D systems. In one dimension, each trajectory will either get arbitrarily close to a fixed point, or go off to infinity. Now let's consider a concrete example.
Examples
Consider the 1D system called the Logistic Equation which models the population dynamics of a single species.
\[ \dot{x} = rx(1-\frac{x}{L}) \]Where \(x(t)\) is the population of the species at time \(t\), \(r\) is the reproduction rate, and \(L\) is the carrying capacity. \(r\) and \(L\) are both constants. Now let's find when the population stops changing. This happens when
\[ rx(1-\frac{x}{L}) = 0 \]Rearranging for \(x\), we get
\[ -\frac{x^2}{L} + x = 0 \]This is a quadratic equation in \(x\), with \(a = -\frac{1}{L}, b = 1, c= 0\). The quadratic equation is:
\[ \frac{-b \pm \sqrt{b^2-4ac}}{2a} \]With our values we get
\[ \frac{(-1 \pm \sqrt{1})}{-2/L} \]\(L\) is a free parameter and so we will let \(L = 100\) for simplicity. Then we have two fixed points:
\[ \begin{align} x_1 &= \frac{(-1 + 1)}{-2/100} = 0 \\ x_2 &= \frac{(-1-1)}{-2/100} = 100 \end{align} \]Now let's interpret this. If the population is originally at \(0\), then it will never grow. This makes sense and is physically accurate. On the other hand, if the population is at \(100\) (its carrying capacity), then it won't grow (or shrink), the population will remain at that value forever.
What about other values? There are two important regions to consider, populations between \(0\) and \(100\) and populations greater than \(100\). To understand them, we must understand the right hand side of the ODE, i.e.
\[ rx(1-\frac{x}{100}) \]Now let's take \(r=1.25\). In other words the population grows by a quarter of its current population. Subbing \(1.25\) in, we have
\[ 1.25x(1-\frac{x}{100}) \]This is a concave down parabola with zeros at \(x=0\) and \(x=100\).
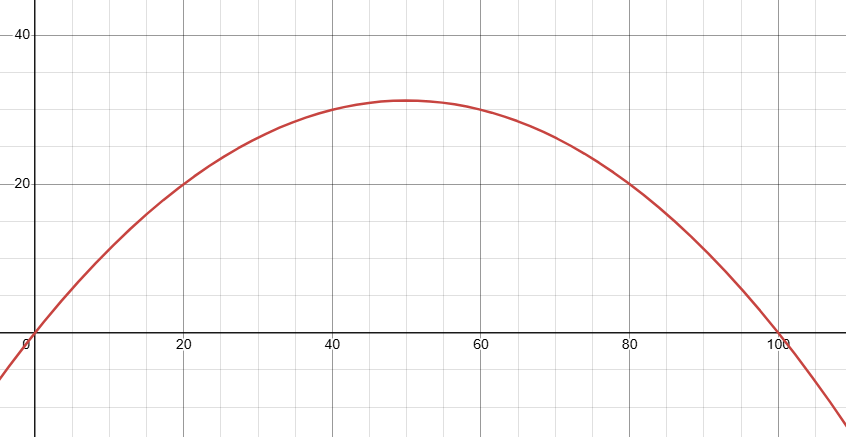
This curve is itself what dictates the population change. So when this curve is negative, we have population loss, conversely when it is positive, we have population growth. In 1D it is useful to plot \(x\) vs. \(\dot{x}\). Doing so, we have the following graph.
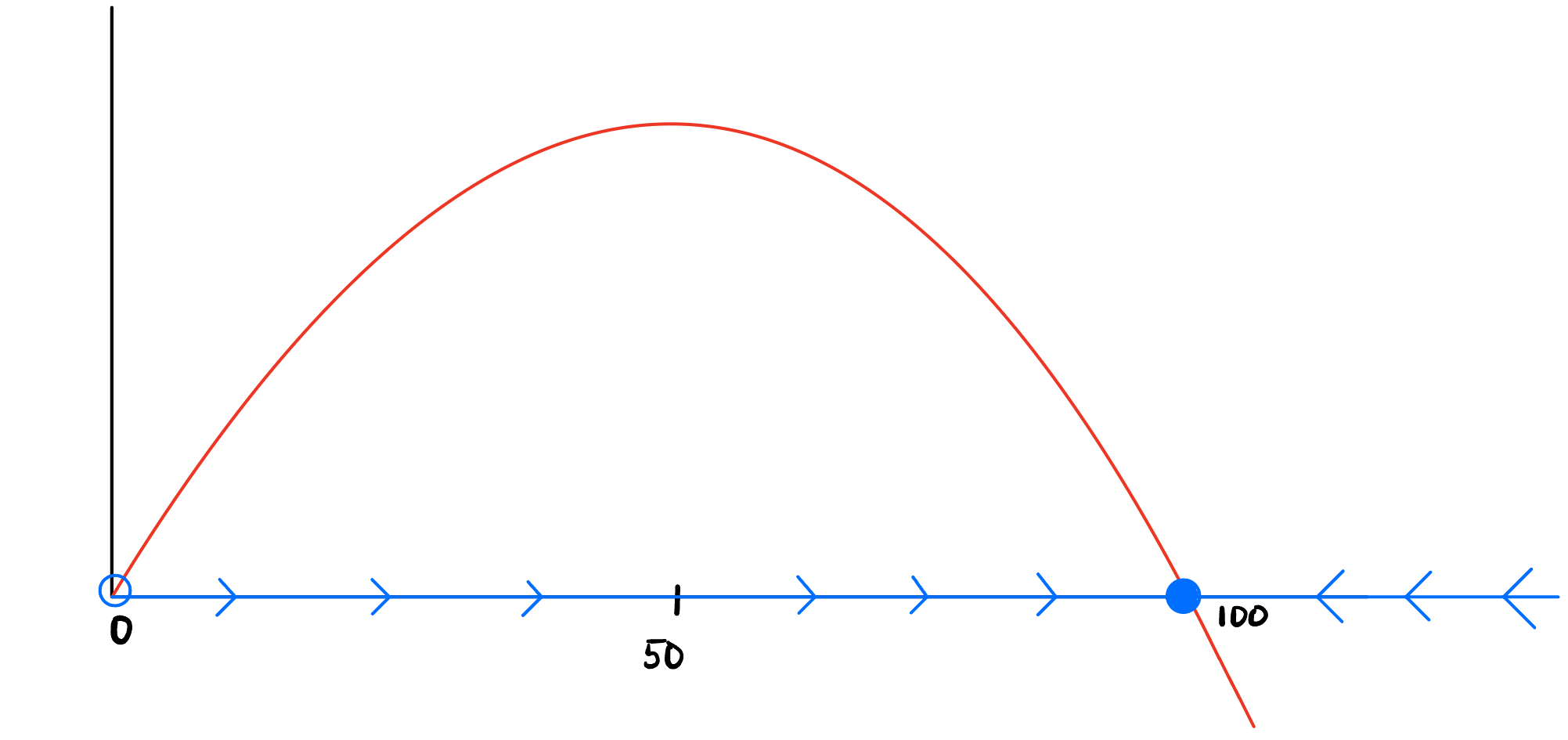
The blue line represents the actual population. The arrows tell you where the population will move in time. At \(x=0\), all arrows point away from it. We say that this fixed point is unstable, (also called a source). We denote this graphically with the empty circle. At \(x=100\), all arrows near it are pointing towards it. We call this fixed point stable (also called attracting), denoted with a filled in circle.
Linearization and Fixed Point Stability
Although we can see all of this graphically, we need a way to mathematically deduce these results. This is where linearization is used. The idea is to see what would happen to a trajectory that starts very close to a fixed point. Consider a small perturbation near a fixed point:
\[ x = x^*+\eta(t) \implies \dot{x} = \dot{\eta}(t) \]Since \(x^*\) is a fixed point, its derivative is \(0\). Then,
\[ \dot{\eta}(t) = f(x^* + \eta(t)) \]Now we linearize using a Taylor expansion of \(f\) about \(x^*\):
\[ f(x^* + \eta) \approx f(x^*) + f'(x^*)\eta + \mathcal{O}(\eta^2) \]But \(f(x^*) = 0\). Ignoring higher-order terms gives:
\[ \dot{\eta}(t) \approx f'(x^*) \eta(t) \implies \eta(t) = \eta(0) e^{f'(x^*) t} \]- If \(f'(x^*) < 0\), then \(\eta(t) \to 0\) and the fixed point is stable.
- If \(f'(x^*) > 0\), then \(\eta(t)\) grows and the fixed point is unstable.
Linearization of the Logistic Equation
\[ f'(x) = 1.25-2.5\frac{x}{100} \]At \(x^* = 0\): \(f'(0) = 1.25 \implies f'(x^*) > 0\) (unstable).
At \(x^* = 100\): \(f'(100) = 1.25-2.5 = -1.25 \implies f'(x^*) < 0\) (stable).
Both fixed points are hyperbolic. If the distance to the fixed point decays, it's attracting. If it grows, it's repelling. This concludes the preliminary analysis of 1D systems.